N = 8;
wmin = .1; wmax = 100;
hmin = .1; hmax = 6;
Smin = 1/5; Smax = 5;
sigma_max = 1;
ymax = 10;
E = 1; F = 1;
cvx_begin gp
variables w(N) h(N) v(N+1) y(N+1);
minimize( w'*h )
subject to
d = 6*F*ones(N,1)./(E*ones(N,1).*w.*h.^3);
for i = 1:N
(2*i-1)*d(i) + v(i+1) <= v(i);
(i-1/3)*d(i) + v(i+1) + y(i+1) <= y(i);
end
wmin <= w <= wmax;
hmin <= h <= hmax;
Smin <= h./w <= Smax;
6*F*[1:N]'./(w.*(h.^2)) <= sigma_max;
y(1) <= ymax;
cvx_end
disp('The optimal widths and heights are: ');
w, h
fprintf(1,'The optimal minimum volume of the beam is %3.4f.\n', sum(w.*h))
figure, clf
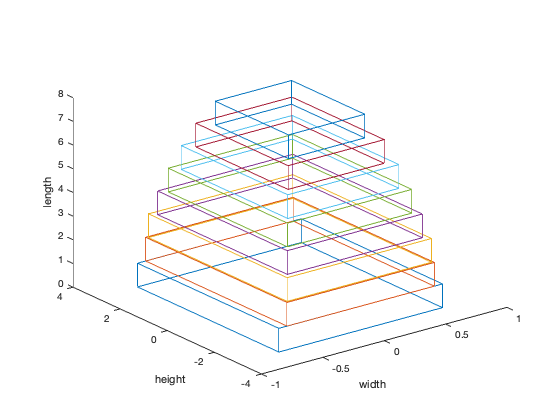
cantilever_beam_plot([h; w])
Calling Mosek 9.1.9: 323 variables, 144 equality constraints
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 144
Cones : 48
Scalar variables : 323
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 16
Eliminator terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 2 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 144
Cones : 48
Scalar variables : 323
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 56
Optimizer - Cones : 49
Optimizer - Scalar variables : 185 conic : 146
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 276 after factor : 306
Factor - dense dim. : 0 flops : 4.18e+03
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 9.3e+00 1.3e+00 4.0e+01 0.00e+00 0.000000000e+00 -3.864489608e+01 1.0e+00 0.00
1 5.1e+00 7.0e-01 1.7e+01 3.58e-01 1.743951235e+00 -2.266239385e+01 5.4e-01 0.01
2 1.1e+00 1.6e-01 1.6e+00 7.70e-01 4.249122204e+00 -1.363745584e+00 1.2e-01 0.01
3 5.6e-01 7.7e-02 5.5e-01 1.15e+00 4.459481801e+00 1.911303501e+00 6.0e-02 0.01
4 1.6e-01 2.2e-02 7.6e-02 1.15e+00 4.122703747e+00 3.463984524e+00 1.7e-02 0.01
5 4.4e-02 6.0e-03 1.1e-02 1.08e+00 3.828909022e+00 3.650940885e+00 4.7e-03 0.01
6 1.1e-02 1.5e-03 1.4e-03 1.04e+00 3.771851182e+00 3.729072170e+00 1.1e-03 0.01
7 2.4e-03 3.3e-04 1.5e-04 1.01e+00 3.753436111e+00 3.743849430e+00 2.6e-04 0.01
8 9.7e-04 1.3e-04 3.9e-05 9.85e-01 3.749690488e+00 3.745774943e+00 1.0e-04 0.01
9 3.5e-04 4.8e-05 8.6e-06 9.89e-01 3.748107109e+00 3.746682810e+00 3.8e-05 0.01
10 2.3e-04 3.2e-05 4.6e-06 9.64e-01 3.747708483e+00 3.746767716e+00 2.4e-05 0.01
11 4.8e-05 6.6e-06 4.5e-07 9.88e-01 3.747223797e+00 3.747025029e+00 5.1e-06 0.01
12 2.2e-05 3.1e-06 1.5e-07 9.68e-01 3.747136513e+00 3.747041537e+00 2.4e-06 0.02
13 4.4e-06 6.2e-07 1.3e-08 9.88e-01 3.747083302e+00 3.747064323e+00 4.8e-07 0.02
14 2.1e-06 3.0e-07 4.5e-09 9.70e-01 3.747074316e+00 3.747064994e+00 2.3e-07 0.02
15 4.6e-07 6.5e-08 4.7e-10 9.88e-01 3.747068818e+00 3.747066752e+00 5.1e-08 0.02
16 2.5e-07 3.4e-08 1.8e-10 9.74e-01 3.747067830e+00 3.747066722e+00 2.7e-08 0.02
17 7.0e-08 7.2e-09 1.8e-11 9.90e-01 3.747067132e+00 3.747066899e+00 5.6e-09 0.02
18 7.0e-08 7.2e-09 1.8e-11 9.72e-01 3.747067132e+00 3.747066899e+00 5.6e-09 0.02
19 7.0e-08 7.2e-09 1.8e-11 9.72e-01 3.747067132e+00 3.747066899e+00 5.6e-09 0.02
20 3.9e-08 3.7e-09 6.8e-12 9.72e-01 3.747067021e+00 3.747066898e+00 2.9e-09 0.02
21 4.8e-08 3.7e-09 6.8e-12 9.91e-01 3.747067021e+00 3.747066898e+00 2.9e-09 0.02
22 3.1e-08 3.4e-09 5.8e-12 1.00e+00 3.747067011e+00 3.747066900e+00 2.6e-09 0.02
23 4.4e-08 3.0e-09 5.0e-12 1.00e+00 3.747067001e+00 3.747066901e+00 2.4e-09 0.02
24 3.6e-08 2.9e-09 4.6e-12 1.00e+00 3.747066997e+00 3.747066902e+00 2.3e-09 0.02
25 3.3e-08 2.8e-09 4.3e-12 1.00e+00 3.747066993e+00 3.747066902e+00 2.2e-09 0.03
26 4.4e-08 2.5e-09 3.7e-12 1.00e+00 3.747066985e+00 3.747066903e+00 1.9e-09 0.03
27 4.3e-08 2.5e-09 3.6e-12 9.83e-01 3.747066984e+00 3.747066903e+00 1.9e-09 0.03
28 4.5e-08 2.2e-09 3.1e-12 1.00e+00 3.747066977e+00 3.747066904e+00 1.7e-09 0.03
29 4.7e-08 2.2e-09 3.0e-12 1.00e+00 3.747066975e+00 3.747066904e+00 1.7e-09 0.03
30 4.8e-08 2.2e-09 3.0e-12 9.83e-01 3.747066975e+00 3.747066904e+00 1.7e-09 0.03
31 4.7e-08 1.9e-09 2.5e-12 1.00e+00 3.747066969e+00 3.747066905e+00 1.5e-09 0.03
Optimizer terminated. Time: 0.03
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: 3.7470669691e+00 nrm: 2e+01 Viol. con: 8e-08 var: 9e-09 cones: 1e-08
Dual. obj: 3.7470669053e+00 nrm: 1e+00 Viol. con: 0e+00 var: 1e-09 cones: 0e+00
Optimizer summary
Optimizer - time: 0.03
Interior-point - iterations : 31 time: 0.03
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +42.3965
The optimal widths and heights are:
w =
0.6214
0.7830
0.9060
1.0124
1.1004
1.1762
1.2000
1.3333
h =
3.1072
3.9149
4.5298
5.0620
5.5019
5.8811
6.0000
6.0000
The optimal minimum volume of the beam is 42.3965.