n=4;
m=40;
randn('state',0);
u = linspace(-1,1,m);
v = 1./(5+40*u.^2) + 0.1*u.^3 + 0.01*randn(1,m);
a = -1/3; b = 1/3;
u1 = u(find(u<a)); m1 = length(u1);
u2 = u(find((u >= a) & (u<b))); m2 = length(u2);
u3 = u(find((u >= b))); m3 = length(u3);
A1 = vander(u1'); A1 = fliplr(A1(:,m1-n+[1:n]));
A2 = vander(u2'); A2 = fliplr(A2(:,m2-n+[1:n]));
A3 = vander(u3'); A3 = fliplr(A3(:,m3-n+[1:n]));
fprintf(1,'Computing splines in the case of L2-norm...');
cvx_begin
variables x1(n) x2(n) x3(n)
minimize ( norm( [A1*x1;A2*x2;A3*x3] - v') )
[1 a a^2 a^3]*x1 == [1 a a^2 a^3]*x2;
[0 1 2*a 3*a^2]*x1 == [0 1 2*a 3*a^2]*x2;
[0 0 2 6*a ]*x1 == [0 0 2 6*a ]*x2;
[1 b b^2 b^3]*x2 == [1 b b^2 b^3]*x3;
[0 1 2*b 3*b^2]*x2 == [0 1 2*b 3*b^2]*x3;
[0 0 2 6*b ]*x2 == [0 0 2 6*b ]*x3;
cvx_end
fprintf(1,'Done! \n');
fprintf(1,'Computing splines in the case of Linfty-norm...');
cvx_begin
variables xl1(n) xl2(n) xl3(n)
minimize ( norm( [A1*xl1;A2*xl2;A3*xl3] - v', inf) )
[1 a a^2 a^3]*xl1 == [1 a a^2 a^3]*xl2;
[0 1 2*a 3*a^2]*xl1 == [0 1 2*a 3*a^2]*xl2;
[0 0 2 6*a ]*xl1 == [0 0 2 6*a ]*xl2;
[1 b b^2 b^3]*xl2 == [1 b b^2 b^3]*xl3;
[0 1 2*b 3*b^2]*xl2 == [0 1 2*b 3*b^2]*xl3;
[0 0 2 6*b ]*xl2 == [0 0 2 6*b ]*xl3;
cvx_end
fprintf(1,'Done! \n');
u1s = linspace(-1.0,a,1000)';
p1 = x1(1) + x1(2)*u1s + x1(3)*u1s.^2 + x1(4).*u1s.^3;
p1l1 = xl1(1) + xl1(2)*u1s + xl1(3)*u1s.^2 + xl1(4).*u1s.^3;
u2s = linspace(a,b,1000)';
p2 = x2(1) + x2(2)*u2s + x2(3)*u2s.^2 + x2(4).*u2s.^3;
p2l1 = xl2(1) + xl2(2)*u2s + xl2(3)*u2s.^2 + xl2(4).*u2s.^3;
u3s = linspace(b,1.0,1000)';
p3 = x3(1) + x3(2)*u3s + x3(3)*u3s.^2 + x3(4).*u3s.^3;
p3l1 = xl3(1) + xl3(2)*u3s + xl3(3)*u3s.^2 + xl3(4).*u3s.^3;
us = [u1s;u2s;u3s];
p = [p1;p2;p3];
pl = [p1l1;p2l1;p3l1];
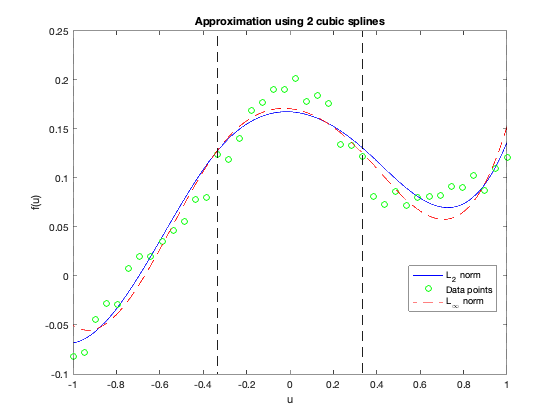
d = plot(us,p,'b-',u,v,'go', us,pl,'r--',...
[-1 -1], [-0.1 0.25], 'k--', [1 1], [-0.1 0.25], 'k--', ...
[a a], [-0.1 0.25], 'k--', [b b], [-0.1 0.25], 'k--');
title('Approximation using 2 cubic splines');
xlabel('u');
ylabel('f(u)');
legend('L_2 norm','Data points','L_{\infty} norm', 'Location','Best');
Computing splines in the case of L2-norm...
Calling Mosek 9.1.9: 47 variables, 13 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 13
Cones : 1
Scalar variables : 47
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 2 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 13
Cones : 1
Scalar variables : 47
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 12
Optimizer - Cones : 2
Optimizer - Scalar variables : 48 conic : 48
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 78 after factor : 78
Factor - dense dim. : 0 flops : 2.03e+03
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 0.0e+00 1.0e+00 2.0e+00 0.00e+00 0.000000000e+00 -1.000000000e+00 1.0e+00 0.00
1 1.0e-15 1.2e-01 8.6e-02 9.89e-01 -1.876131318e-02 -1.352241468e-01 1.2e-01 0.01
2 1.0e-15 2.2e-02 8.3e-03 8.52e-01 -1.009678909e-01 -1.162965077e-01 2.2e-02 0.01
3 4.6e-15 7.1e-04 5.3e-05 8.61e-01 -1.163435428e-01 -1.167380076e-01 7.1e-04 0.01
4 1.1e-14 5.7e-07 8.3e-10 9.99e-01 -1.166026860e-01 -1.166035383e-01 5.7e-07 0.01
5 5.3e-13 7.5e-08 4.1e-11 1.00e+00 -1.166032400e-01 -1.166033506e-01 7.5e-08 0.01
6 6.2e-13 3.6e-09 4.3e-13 1.00e+00 -1.166033515e-01 -1.166033567e-01 3.6e-09 0.01
Optimizer terminated. Time: 0.01
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -1.1660335149e-01 nrm: 1e+00 Viol. con: 3e-12 var: 0e+00 cones: 0e+00
Dual. obj: -1.1660335670e-01 nrm: 1e+00 Viol. con: 0e+00 var: 9e-10 cones: 0e+00
Optimizer summary
Optimizer - time: 0.01
Interior-point - iterations : 6 time: 0.01
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +0.116603
Done!
Computing splines in the case of Linfty-norm...
Calling Mosek 9.1.9: 126 variables, 53 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 53
Cones : 40
Scalar variables : 126
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 53
Cones : 40
Scalar variables : 126
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 13
Optimizer - Cones : 41
Optimizer - Scalar variables : 87 conic : 87
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 91 after factor : 91
Factor - dense dim. : 0 flops : 3.40e+03
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 3.9e+01 1.0e+00 1.0e+00 0.00e+00 0.000000000e+00 0.000000000e+00 1.0e+00 0.00
1 1.9e+01 4.8e-01 6.8e-02 2.86e+00 -5.444035897e-03 -1.786263660e-01 4.8e-01 0.01
2 1.3e+01 3.4e-01 5.7e-02 1.02e+01 -8.777315595e-03 -8.541770716e-03 3.4e-01 0.01
3 5.6e+00 1.4e-01 1.7e-02 1.29e+00 -2.576830802e-02 -2.455982413e-02 1.4e-01 0.01
4 1.6e+00 4.2e-02 2.5e-03 1.15e+00 -2.935524177e-02 -2.942035398e-02 4.2e-02 0.01
5 1.7e-01 4.3e-03 4.0e-05 1.01e+00 -3.153740998e-02 -3.181022484e-02 4.3e-03 0.01
6 4.2e-04 1.1e-05 5.2e-09 1.00e+00 -3.203705407e-02 -3.203774251e-02 1.1e-05 0.01
7 1.7e-06 4.3e-08 1.3e-12 1.00e+00 -3.203832952e-02 -3.203833221e-02 4.3e-08 0.01
8 6.7e-13 1.4e-12 5.1e-19 1.00e+00 -3.203833452e-02 -3.203833452e-02 1.9e-14 0.01
Optimizer terminated. Time: 0.02
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -3.2038334523e-02 nrm: 1e+00 Viol. con: 6e-14 var: 0e+00 cones: 0e+00
Dual. obj: -3.2038334523e-02 nrm: 1e+00 Viol. con: 0e+00 var: 1e-13 cones: 5e-18
Optimizer summary
Optimizer - time: 0.02
Interior-point - iterations : 8 time: 0.01
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +0.0320383
Done!