n = 2;
randn('state',3);
N = 10; M = 6;
Y = [1.5+1*randn(1,M); 2*randn(1,M)];
X = [-1.5+1*randn(1,N); 2*randn(1,N)];
T = [-1 1; 1 1];
Y = T*Y; X = T*X;
fprintf('Finding a separating hyperplane...');
cvx_begin
variables a(n) b(1)
X'*a - b >= 1;
Y'*a - b <= -1;
cvx_end
fprintf(1,'Done! \n');
linewidth = 0.5;
t_min = min([X(1,:),Y(1,:)]);
t_max = max([X(1,:),Y(1,:)]);
t = linspace(t_min-1,t_max+1,100);
p = -a(1)*t/a(2) + b/a(2);
graph = plot(X(1,:),X(2,:), 'o', Y(1,:), Y(2,:), 'o');
set(graph(1),'LineWidth',linewidth);
set(graph(2),'LineWidth',linewidth);
set(graph(2),'MarkerFaceColor',[0 0.5 0]);
hold on;
plot(t,p, '-r');
axis equal
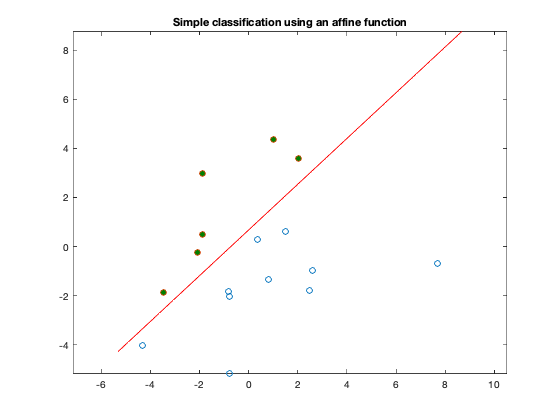
title('Simple classification using an affine function');
Finding a separating hyperplane...
Calling Mosek 9.1.9: 16 variables, 3 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : LO (linear optimization problem)
Constraints : 3
Cones : 0
Scalar variables : 16
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 2 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : LO (linear optimization problem)
Constraints : 3
Cones : 0
Scalar variables : 16
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 3
Optimizer - Cones : 0
Optimizer - Scalar variables : 16 conic : 0
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 6 after factor : 6
Factor - dense dim. : 0 flops : 2.06e+02
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 7.2e+00 2.8e+00 2.1e+01 0.00e+00 -1.600000000e+01 0.000000000e+00 2.0e+00 0.00
1 1.6e+00 6.2e-01 4.6e+00 -2.36e+00 -5.398997601e+04 0.000000000e+00 4.4e-01 0.01
2 2.0e-01 7.8e-02 5.9e-01 -9.52e-02 -4.191335959e+02 0.000000000e+00 5.5e-02 0.01
3 1.1e-03 4.2e-04 3.1e-03 8.17e-01 -2.512600010e+00 0.000000000e+00 3.0e-04 0.01
4 1.1e-07 4.2e-08 3.1e-07 9.99e-01 -2.516481137e-04 0.000000000e+00 3.0e-08 0.01
5 1.1e-11 4.2e-12 3.1e-11 1.00e+00 -2.516481278e-08 0.000000000e+00 3.0e-12 0.01
6 1.1e-15 1.0e-15 3.1e-15 1.00e+00 -2.516481278e-12 0.000000000e+00 3.0e-16 0.01
Basis identification started.
Primal basis identification phase started.
Primal basis identification phase terminated. Time: 0.00
Dual basis identification phase started.
Dual basis identification phase terminated. Time: 0.00
Basis identification terminated. Time: 0.00
Optimizer terminated. Time: 0.02
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -2.5164812778e-12 nrm: 8e-13 Viol. con: 2e-12 var: 0e+00
Dual. obj: 0.0000000000e+00 nrm: 2e+03 Viol. con: 0e+00 var: 2e-13
Basic solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: 0.0000000000e+00 nrm: 0e+00 Viol. con: 0e+00 var: 0e+00
Dual. obj: 0.0000000000e+00 nrm: 1e+01 Viol. con: 0e+00 var: 2e-13
Optimizer summary
Optimizer - time: 0.02
Interior-point - iterations : 6 time: 0.01
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 3 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): -0
Done!