As = {}; bs = {}; cs = {};
As{1} = [ 0.1355 0.1148; 0.1148 0.4398];
As{2} = [ 0.6064 -0.1022; -0.1022 0.7344];
As{3} = [ 0.7127 -0.0559; -0.0559 0.9253];
As{4} = [ 0.2706 -0.1379; -0.1379 0.2515];
As{5} = [ 0.4008 -0.1112; -0.1112 0.2107];
bs{1} = [ -0.2042 0.0264]';
bs{2} = [ 0.8259 -2.1188]';
bs{3} = [ -0.0256 1.0591]';
bs{4} = [ 0.1827 -0.3844]';
bs{5} = [ 0.3823 -0.8253]';
cs{1} = 0.2351;
cs{2} = 5.8250;
cs{3} = 0.9968;
cs{4} = -0.2981;
cs{5} = 2.6735;
n = 2;
m = size(bs,2);
cvx_begin sdp
variable Asqr(n,n) symmetric
variable btilde(n)
variable t(m)
maximize( det_rootn( Asqr ) )
subject to
t >= 0;
for i = 1:m
[ -(Asqr - t(i)*As{i}), -(btilde - t(i)*bs{i}), zeros(n,n);
-(btilde - t(i)*bs{i})', -(- 1 - t(i)*cs{i}), -btilde';
zeros(n,n), -btilde, Asqr] >= 0;
end
cvx_end
A = sqrtm(Asqr);
b = A\btilde;
noangles = 200;
angles = linspace( 0, 2 * pi, noangles );
clf
for i=1:m
Ai = sqrtm(As{i}); bi = Ai\bs{i};
alpha = bs{i}'*inv(As{i})*bs{i} - cs{i};
ellipse = Ai \ [ sqrt(alpha)*cos(angles)-bi(1) ; sqrt(alpha)*sin(angles)-bi(2) ];
plot( ellipse(1,:), ellipse(2,:), 'b-' );
hold on
end
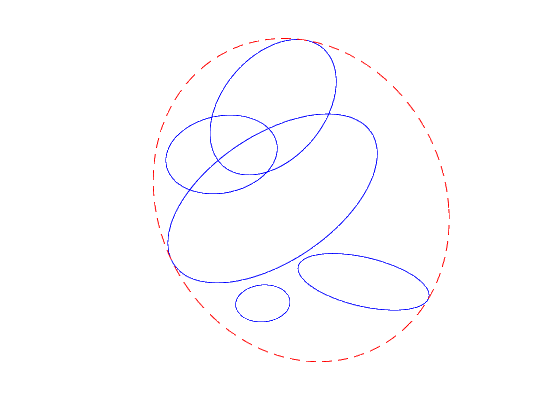
ellipse = A \ [ cos(angles) - b(1) ; sin(angles) - b(2) ];
plot( ellipse(1,:), ellipse(2,:), 'r--' );
axis square
axis off
hold off
Calling Mosek 9.1.9: 94 variables, 15 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 15
Cones : 1
Scalar variables : 9
Matrix variables : 6
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 15
Cones : 1
Scalar variables : 9
Matrix variables : 6
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 13
Optimizer - Cones : 1
Optimizer - Scalar variables : 8 conic : 3
Optimizer - Semi-definite variables: 6 scalarized : 85
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 60 after factor : 60
Factor - dense dim. : 0 flops : 3.60e+03
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 1.6e+00 1.0e+00 6.0e+00 0.00e+00 5.000000000e+00 0.000000000e+00 1.0e+00 0.00
1 2.7e-01 1.7e-01 3.3e-01 2.94e-01 1.333260668e+00 2.965940792e-01 1.7e-01 0.01
2 7.7e-02 4.8e-02 3.7e-02 1.60e+00 3.245334863e-01 1.071294909e-01 4.8e-02 0.01
3 1.8e-02 1.1e-02 4.1e-03 1.44e+00 1.142900036e-01 7.290687311e-02 1.1e-02 0.01
4 3.2e-03 2.0e-03 3.8e-04 9.29e-01 8.576919578e-02 7.790604088e-02 2.0e-03 0.01
5 6.0e-04 3.7e-04 3.0e-05 8.94e-01 8.031824828e-02 7.881846217e-02 3.7e-04 0.01
6 1.6e-05 9.9e-06 1.3e-07 9.96e-01 7.872673678e-02 7.868618068e-02 9.9e-06 0.01
7 6.5e-07 4.0e-07 1.1e-09 1.00e+00 7.868325294e-02 7.868160602e-02 4.0e-07 0.01
8 7.6e-08 4.7e-08 4.3e-11 1.00e+00 7.868166869e-02 7.868147564e-02 4.7e-08 0.01
9 3.8e-09 2.4e-09 4.9e-13 1.00e+00 7.868147490e-02 7.868146527e-02 2.4e-09 0.01
Optimizer terminated. Time: 0.02
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: 7.8681474900e-02 nrm: 1e+00 Viol. con: 1e-08 var: 1e-08 barvar: 0e+00 cones: 0e+00
Dual. obj: 7.8681465270e-02 nrm: 3e+00 Viol. con: 0e+00 var: 4e-16 barvar: 2e-09 cones: 0e+00
Optimizer summary
Optimizer - time: 0.02
Interior-point - iterations : 9 time: 0.02
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +0.0786815