rand('state',0);
N = 100;
M = 120;
X = 2 * rand(2,N) - 1;
X = X * diag(0.9*rand(1,N)./sqrt(sum(X.^2)));
Y = 2 * rand(2,M) - 1;
Y = Y * diag((1.1+rand(1,M))./sqrt(sum(Y.^2)));
d = sqrt(sum((X-[1.1;0]*ones(1,N)).^2));
Y = [ Y, X(:,d<0.9) ];
X = X(:,d>1);
N = size(X,2);
M = size(Y,2);
p1 = [0,0,1,0,1,2,0,1,2,3,0,1,2,3,4]';
p2 = [0,1,1,2,2,2,3,3,3,3,4,4,4,4,4]'-p1;
np = length(p1);
op = ones(np,1);
monX = X(op,:) .^ p1(:,ones(1,N)) .* X(2*op,:) .^ p2(:,ones(1,N));
monY = Y(op,:) .^ p1(:,ones(1,M)) .* Y(2*op,:) .^ p2(:,ones(1,M));
fprintf(1,'Finding the optimal polynomial of order 4 that separates the 2 classes...');
cvx_begin
variables a(np) t(1)
minimize ( t )
a'*monX <= t;
a'*monY >= -t;
norm(a) <= 1;
cvx_end
fprintf(1,'Done! \n');
nopts = 2000;
angles = linspace(0,2*pi,nopts);
cont = zeros(2,nopts);
for i=1:nopts
v = [cos(angles(i)); sin(angles(i))];
l = 0; u = 1;
while ( u - l > 1e-3 )
s = (u+l)/2;
x = s * v;
if a' * ( x(op,:) .^ p1 .* x(2*op) .^ p2 ) > 0,
u = s;
else
l = s;
end
end;
s = (u+l)/2;
cont(:,i) = s*v;
end;
graph = plot(X(1,:),X(2,:),'o', Y(1,:), Y(2,:),'o', cont(1,:), cont(2,:), '-');
set(graph(2),'MarkerFaceColor',[0 0.5 0]);
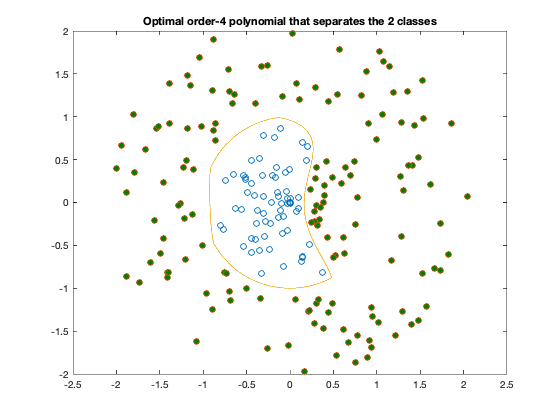
title('Optimal order-4 polynomial that separates the 2 classes')
Finding the optimal polynomial of order 4 that separates the 2 classes...
Calling Mosek 9.1.9: 228 variables, 17 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
MOSEK warning 710: #1 (nearly) zero elements are specified in sparse col '' (31) of matrix 'A'.
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 17
Cones : 1
Scalar variables : 228
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 17
Cones : 1
Scalar variables : 228
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 16
Optimizer - Cones : 1
Optimizer - Scalar variables : 227 conic : 16
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 136 after factor : 136
Factor - dense dim. : 0 flops : 5.91e+04
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 1.0e+00 0.0e+00 2.0e+00 0.00e+00 1.000000000e+00 0.000000000e+00 1.0e+00 0.00
1 3.6e-01 8.9e-16 1.2e-01 1.98e+00 2.844057249e-02 -2.692825782e-01 3.6e-01 0.01
2 2.5e-01 1.8e-15 6.2e-02 8.98e+00 1.579292632e-02 -6.770937750e-03 2.5e-01 0.01
3 1.1e-01 3.6e-15 1.4e-02 1.49e+00 4.177907458e-03 -5.443218172e-03 1.1e-01 0.01
4 7.2e-02 8.9e-15 7.6e-03 1.10e+00 2.922507480e-03 -3.777454964e-03 7.2e-02 0.01
5 1.7e-02 2.7e-15 1.5e-03 7.15e-01 2.243340673e-03 5.706381852e-04 1.7e-02 0.01
6 4.9e-03 6.2e-15 7.4e-04 -5.81e-01 7.210723047e-03 9.231164533e-03 4.9e-03 0.01
7 3.4e-03 3.6e-15 3.2e-04 -9.33e-02 2.492456091e-02 2.493770965e-02 3.4e-03 0.01
8 2.0e-03 5.3e-15 1.4e-04 3.33e-01 2.508769607e-02 2.483220243e-02 2.0e-03 0.01
9 4.2e-04 3.6e-15 1.7e-05 4.40e-01 3.627400999e-02 3.627382372e-02 4.2e-04 0.01
10 2.0e-04 2.2e-15 6.2e-06 5.30e-01 3.853167902e-02 3.854114677e-02 2.0e-04 0.01
11 6.1e-05 1.1e-14 1.2e-06 6.12e-01 4.028611633e-02 4.028286811e-02 6.1e-05 0.01
12 8.3e-06 6.2e-15 5.9e-08 7.87e-01 4.088928864e-02 4.088780570e-02 8.3e-06 0.01
13 6.1e-07 4.4e-15 1.1e-09 9.12e-01 4.098714045e-02 4.098686333e-02 6.1e-07 0.02
14 2.3e-09 6.3e-13 1.8e-13 9.95e-01 4.099320912e-02 4.099320672e-02 2.3e-09 0.02
Optimizer terminated. Time: 0.02
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: 4.0993209116e-02 nrm: 1e+00 Viol. con: 2e-09 var: 2e-09 cones: 0e+00
Dual. obj: 4.0993206718e-02 nrm: 5e+00 Viol. con: 0e+00 var: 2e-13 cones: 0e+00
Optimizer summary
Optimizer - time: 0.02
Interior-point - iterations : 14 time: 0.02
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): -0.0409932
Done!