n = 2;
rand('state',0); randn('state',0);
N=50;
X = randn(2,N); X = X*diag(0.99*rand(1,N)./sqrt(sum(X.^2)));
Y = randn(2,N); Y = Y*diag((1.02+rand(1,N))./sqrt(sum(Y.^2)));
T = [1 -1; 2 1]; X = T*X; Y = T*Y;
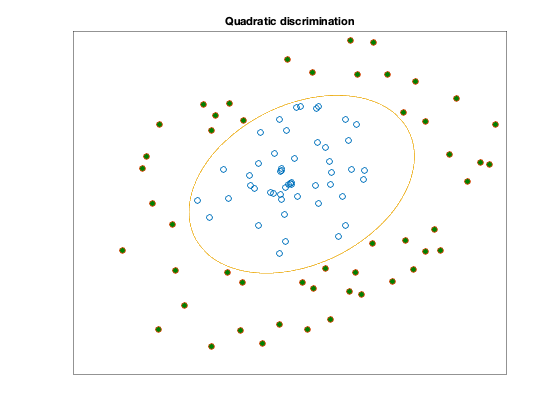
fprintf(1,'Find the optimal ellipsoid that seperates the 2 classes...');
cvx_begin sdp
variable P(n,n) symmetric
variables q(n) r(1)
P <= -eye(n);
sum((X'*P).*X',2) + X'*q + r >= +1;
sum((Y'*P).*Y',2) + Y'*q + r <= -1;
cvx_end
fprintf(1,'Done! \n');
r = -r; P = -P; q = -q;
c = 0.25*q'*inv(P)*q - r;
xc = -0.5*inv(P)*q;
nopts = 1000;
angles = linspace(0,2*pi,nopts);
ell = inv(sqrtm(P/c))*[cos(angles); sin(angles)] + repmat(xc,1,nopts);
graph=plot(X(1,:),X(2,:),'o', Y(1,:), Y(2,:),'o', ell(1,:), ell(2,:),'-');
set(graph(2),'MarkerFaceColor',[0 0.5 0]);
set(gca,'XTick',[]); set(gca,'YTick',[]);
title('Quadratic discrimination');
Find the optimal ellipsoid that seperates the 2 classes...
Calling Mosek 9.1.9: 103 variables, 6 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 6
Cones : 1
Scalar variables : 103
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 6
Cones : 1
Scalar variables : 103
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 6
Optimizer - Cones : 1
Optimizer - Scalar variables : 103 conic : 3
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 21 after factor : 21
Factor - dense dim. : 0 flops : 4.32e+03
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 1.0e+00 1.8e+01 1.0e+00 0.00e+00 0.000000000e+00 0.000000000e+00 1.0e+00 0.00
1 4.6e-01 8.5e+00 3.2e+00 -2.73e+00 -3.831728009e+01 0.000000000e+00 4.6e-01 0.01
2 2.1e-01 3.9e+00 1.1e+00 -6.86e+00 -2.445654132e+01 0.000000000e+00 2.1e-01 0.01
3 8.4e-02 1.5e+00 4.7e-01 -4.54e-01 -3.091392625e+01 0.000000000e+00 8.4e-02 0.01
4 7.9e-03 1.5e-01 2.8e-02 1.05e-01 -1.288518935e+01 0.000000000e+00 7.9e-03 0.01
5 7.5e-05 1.4e-03 3.1e-05 8.76e-01 -1.665478444e-01 0.000000000e+00 7.5e-05 0.01
6 1.5e-07 2.7e-06 2.6e-09 9.99e-01 -3.255917140e-04 0.000000000e+00 1.5e-07 0.01
7 2.6e-13 4.9e-12 4.8e-15 1.00e+00 -9.535103919e-10 0.000000000e+00 2.6e-13 0.01
Optimizer terminated. Time: 0.01
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -9.5351039188e-10 nrm: 3e-10 Viol. con: 3e-12 var: 3e-12 cones: 0e+00
Dual. obj: 0.0000000000e+00 nrm: 3e+01 Viol. con: 0e+00 var: 5e-11 cones: 0e+00
Optimizer summary
Optimizer - time: 0.01
Interior-point - iterations : 7 time: 0.01
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +9.5351e-10
Done!