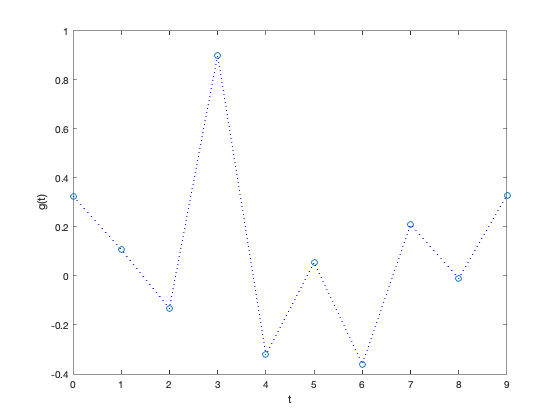
g =.5*[ 0.6526; 0.2157; -0.2639; 1.8024; -0.6430; ...
0.1096; -0.7190; 0.4206; -0.0193; 0.6603;];
n = 30;
D = 10;
m = 15*(length(g) + n);
w = linspace(0,pi,m)';
G = exp( -j*kron(w,[0:length(g)-1]) )*g;
A = exp( -j*kron(w,[0:n-1]) );
Gdes = exp(-j*D*w);
cvx_begin
variable hf(n,1)
minimize( max( abs( G.*(A*hf) - Gdes ) ) )
cvx_end
disp(['Frequency equalization problem is ' cvx_status])
if ~strfind(cvx_status,'Solved')
return
end
Tconv = toeplitz([g; zeros(n-1,1)],[g(1) zeros(1,n-1)]);
times_not_D = [1:D D+2:size(Tconv,1)];
cvx_begin
variable t
variable ht(n,1)
minimize( max( abs( Tconv(times_not_D,:)*ht ) ) )
subject to
Tconv(D+1,:)*ht == 1;
cvx_end
if ~strfind(cvx_status,'Solved')
disp(['Frequency equalization problem is ' cvx_status])
return
end
figure(1)
plot([0:length(g)-1],g,'o',[0:length(g)-1],g,'b:')
xlabel('t')
ylabel('g(t)')
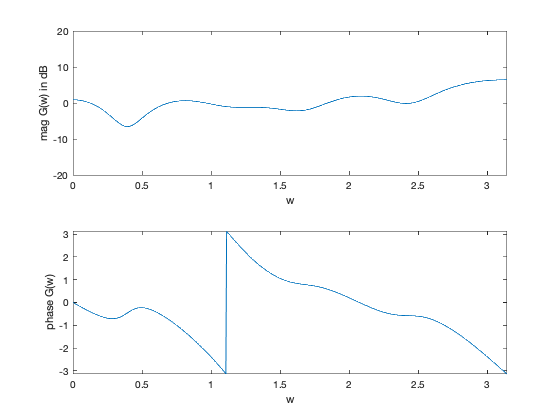
figure(2)
H = exp(-j*kron(w,[0:length(g)-1]))*g;
subplot(2,1,1);
plot(w,20*log10(abs(H)))
axis([0,pi,-20,20])
xlabel('w')
ylabel('mag G(w) in dB')
subplot(2,1,2)
plot(w,angle(H))
axis([0,pi,-pi,pi])
xlabel('w')
ylabel('phase G(w)')
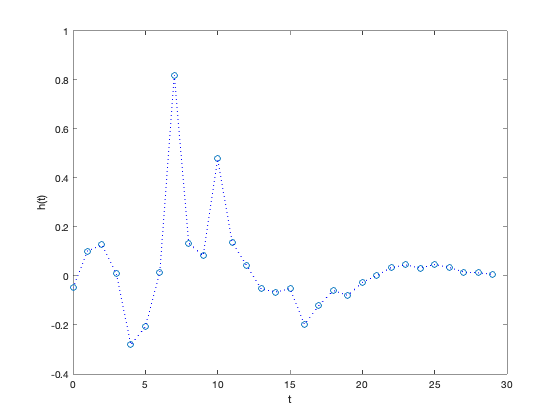
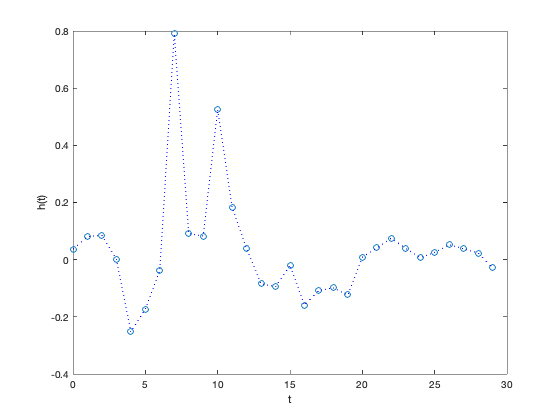
figure(3)
plot([0:n-1],hf,'o',[0:n-1],hf,'b:')
xlabel('t')
ylabel('h(t)')
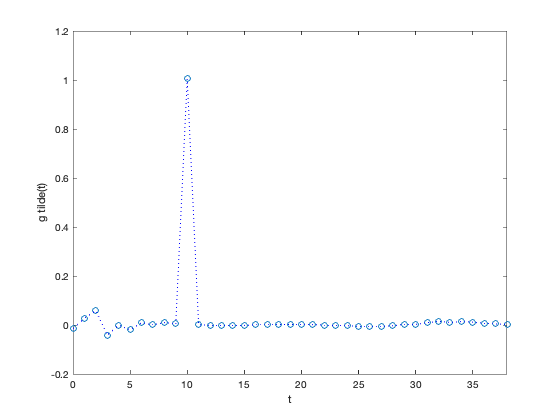
figure(4)
gt=conv(g,hf);
plot([1:length(gt)]-1,gt,'o',[1:length(gt)]-1,gt,'b:')
xlabel('t')
ylabel('g tilde(t)')
axis([0,length(gt)-1,-.2 1.2])
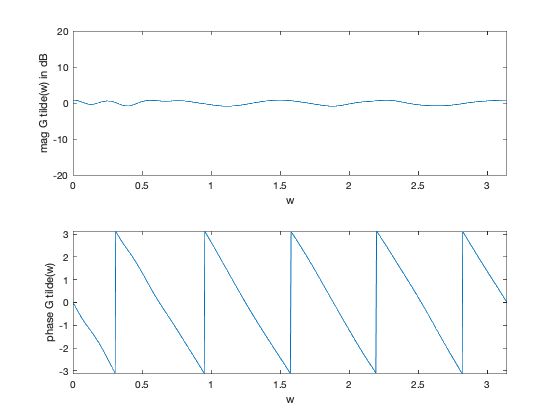
figure(5)
H = exp(-j*kron(w,[0:length(gt)-1]))*gt;
subplot(2,1,1)
plot(w,20*log10(abs(H)))
axis([0,pi,-20,20])
xlabel('w')
ylabel('mag G tilde(w) in dB')
subplot(2,1,2)
plot(w,angle(H))
axis([0,pi,-pi,pi])
xlabel('w')
ylabel('phase G tilde(w)')
figure(6)
plot([0:n-1],ht,'o',[0:n-1],ht,'b:')
xlabel('t')
ylabel('h(t)')
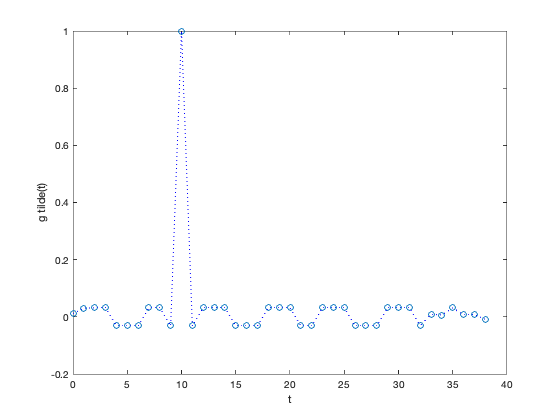
figure(7)
gt=conv(g,ht);
plot([1:length(gt)]-1,gt,'o',[1:length(gt)]-1,gt,'b:')
xlabel('t')
ylabel('g tilde(t)')
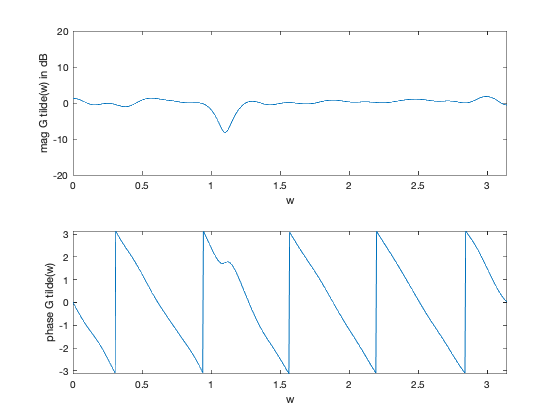
figure(8)
H = exp(-j*kron(w,[0:length(gt)-1]))*gt;
subplot(2,1,1)
plot(w,20*log10(abs(H)))
axis([0,pi,-20,20])
xlabel('w')
ylabel('mag G tilde(w) in dB')
subplot(2,1,2)
plot(w,angle(H))
axis([0,pi,-pi,pi])
xlabel('w')
ylabel('phase G tilde(w)')
Calling Mosek 9.1.9: 2399 variables, 631 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
MOSEK warning 710: #15 (nearly) zero elements are specified in sparse col '' (2397) of matrix 'A'.
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 631
Cones : 600
Scalar variables : 2399
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.01
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 631
Cones : 600
Scalar variables : 2399
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 31
Optimizer - Cones : 600
Optimizer - Scalar variables : 1798 conic : 1798
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 496 after factor : 496
Factor - dense dim. : 0 flops : 1.72e+06
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 6.0e+02 1.0e+00 1.0e+00 0.00e+00 0.000000000e+00 0.000000000e+00 1.0e+00 0.01
1 5.6e+01 9.3e-02 2.3e-02 -1.86e-02 -1.053247766e+00 -1.107657093e+00 9.3e-02 0.02
2 1.4e+01 2.4e-02 5.1e-03 7.43e+00 -1.869314281e-01 -1.462303815e-01 2.4e-02 0.02
3 3.9e+00 6.4e-03 5.2e-04 1.67e+00 -1.134293468e-01 -1.076707815e-01 6.4e-03 0.02
4 1.0e+00 1.7e-03 4.7e-05 1.23e+00 -9.870405328e-02 -9.809674395e-02 1.7e-03 0.03
5 2.8e-01 4.6e-04 5.2e-06 1.05e+00 -9.678705753e-02 -9.670866622e-02 4.6e-04 0.03
6 8.2e-02 1.4e-04 6.3e-07 1.01e+00 -9.650438591e-02 -9.649676640e-02 1.4e-04 0.03
7 2.1e-02 3.5e-05 6.3e-08 1.00e+00 -9.643505521e-02 -9.643532474e-02 3.5e-05 0.03
8 5.4e-03 9.1e-06 6.0e-09 1.00e+00 -9.642852754e-02 -9.642898680e-02 9.1e-06 0.03
9 8.2e-04 1.4e-06 3.3e-10 1.00e+00 -9.642658961e-02 -9.642666784e-02 1.4e-06 0.03
10 8.8e-05 1.5e-07 1.1e-11 1.00e+00 -9.642630830e-02 -9.642631732e-02 1.5e-07 0.04
11 1.2e-05 2.1e-08 5.5e-13 1.00e+00 -9.642628483e-02 -9.642628618e-02 2.1e-08 0.04
12 1.9e-06 3.1e-09 2.9e-14 1.00e+00 -9.642628194e-02 -9.642628217e-02 3.1e-09 0.04
13 2.1e-07 3.5e-10 8.6e-16 1.00e+00 -9.642628168e-02 -9.642628171e-02 3.5e-10 0.04
Optimizer terminated. Time: 0.05
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -9.6426281680e-02 nrm: 1e+00 Viol. con: 2e-08 var: 0e+00 cones: 0e+00
Dual. obj: -9.6426281708e-02 nrm: 8e-01 Viol. con: 0e+00 var: 3e-11 cones: 0e+00
Optimizer summary
Optimizer - time: 0.05
Interior-point - iterations : 13 time: 0.04
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +0.0964263
Frequency equalization problem is Solved
Calling Mosek 9.1.9: 115 variables, 69 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 69
Cones : 38
Scalar variables : 115
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 69
Cones : 38
Scalar variables : 115
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 31
Optimizer - Cones : 39
Optimizer - Scalar variables : 78 conic : 78
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 286 after factor : 316
Factor - dense dim. : 0 flops : 1.04e+04
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 3.7e+01 1.0e+00 1.0e+00 0.00e+00 0.000000000e+00 0.000000000e+00 1.0e+00 0.00
1 1.8e+01 4.8e-01 6.8e-02 2.88e+00 -2.068370829e-03 -1.751009111e-01 4.8e-01 0.01
2 1.4e+01 3.8e-01 6.3e-02 1.04e+01 -3.821493574e-03 -1.475861758e-02 3.8e-01 0.01
3 9.9e+00 2.7e-01 3.8e-02 1.80e+00 -1.616184168e-02 -2.124433938e-02 2.7e-01 0.01
4 2.7e+00 7.4e-02 5.7e-03 1.46e+00 -2.872004696e-02 -2.903709348e-02 7.4e-02 0.01
5 6.5e-01 1.8e-02 6.5e-04 1.08e+00 -3.114938952e-02 -3.126758284e-02 1.8e-02 0.01
6 1.2e-01 3.2e-03 4.7e-05 1.02e+00 -3.156009869e-02 -3.160204324e-02 3.2e-03 0.01
7 1.9e-02 5.1e-04 2.6e-06 1.00e+00 -3.161464641e-02 -3.162942988e-02 5.1e-04 0.01
8 3.4e-03 9.1e-05 1.9e-07 1.00e+00 -3.162308381e-02 -3.162635321e-02 9.1e-05 0.01
9 4.1e-04 1.1e-05 7.4e-09 1.00e+00 -3.162468591e-02 -3.162515599e-02 1.1e-05 0.01
10 7.5e-05 2.0e-06 5.6e-10 1.00e+00 -3.162497479e-02 -3.162506360e-02 2.0e-06 0.01
11 2.2e-06 6.0e-08 2.4e-12 1.00e+00 -3.162504617e-02 -3.162504948e-02 6.0e-08 0.01
12 4.3e-09 1.2e-10 2.1e-16 1.00e+00 -3.162504870e-02 -3.162504871e-02 1.2e-10 0.01
Optimizer terminated. Time: 0.02
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -3.1625048699e-02 nrm: 1e+00 Viol. con: 4e-10 var: 0e+00 cones: 0e+00
Dual. obj: -3.1625048706e-02 nrm: 8e-01 Viol. con: 0e+00 var: 2e-13 cones: 0e+00
Optimizer summary
Optimizer - time: 0.02
Interior-point - iterations : 12 time: 0.01
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +0.031625