n = 20;
wpass = 0.12*pi;
wstop = 0.24*pi;
delta = 1;
m = 15*n;
w = linspace(0,pi,m)';
A = [ones(m,1) 2*cos(kron(w,[1:n-1]))];
ind = find((0 <= w) & (w <= wpass));
Lp = 10^(-delta/20)*ones(length(ind),1);
Up = 10^(+delta/20)*ones(length(ind),1);
Ap = A(ind,:);
ind = find((wstop <= w) & (w <= pi));
As = A(ind,:);
cvx_begin
variable r(n,1)
minimize( max( abs( As*r ) ) )
subject to
Ap*r >= (Lp.^2);
Ap*r <= (Up.^2);
A*r >= 0;
cvx_end
disp(['Problem is ' cvx_status])
if ~strfind(cvx_status,'Solved')
return
end
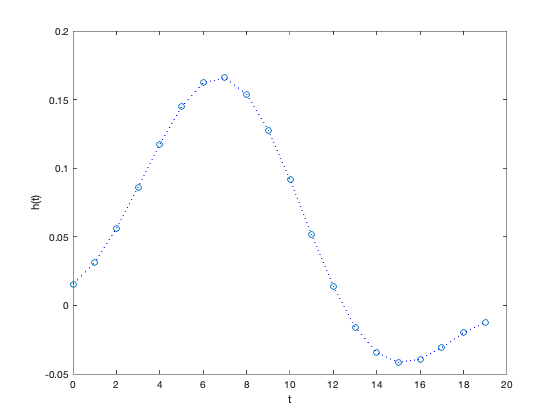
h = spectral_fact(r);
Ustop = 10*log10(cvx_optval);
fprintf(1,'The max attenuation in the stopband is %3.2f dB.\n\n',Ustop);
H = [exp(-j*kron(w,[0:n-1]))]*h;
figure(1)
plot([0:n-1],h','o',[0:n-1],h','b:')
xlabel('t'), ylabel('h(t)')
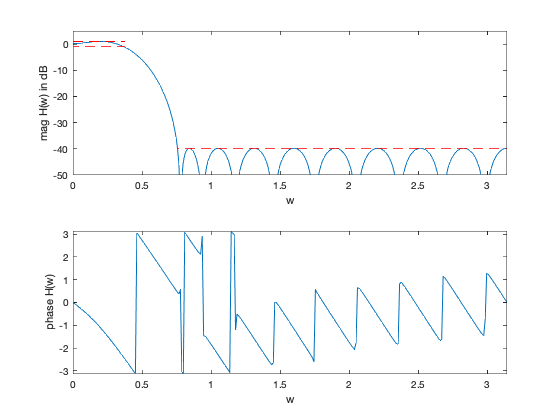
figure(2)
subplot(2,1,1)
plot(w,20*log10(abs(H)), ...
[0 wpass],[delta delta],'r--', ...
[0 wpass],[-delta -delta],'r--', ...
[wstop pi],[Ustop Ustop],'r--')
xlabel('w')
ylabel('mag H(w) in dB')
axis([0 pi -50 5])
subplot(2,1,2)
plot(w,angle(H))
axis([0,pi,-pi,pi])
xlabel('w'), ylabel('phase H(w)')
Calling Mosek 9.1.9: 1056 variables, 249 equality constraints
For improved efficiency, Mosek is solving the dual problem.
------------------------------------------------------------
MOSEK Version 9.1.9 (Build date: 2019-11-21 11:32:15)
Copyright (c) MOSEK ApS, Denmark. WWW: mosek.com
Platform: MACOSX/64-X86
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 249
Cones : 228
Scalar variables : 1056
Matrix variables : 0
Integer variables : 0
Optimizer started.
Presolve started.
Linear dependency checker started.
Linear dependency checker terminated.
Eliminator started.
Freed constraints in eliminator : 0
Eliminator terminated.
Eliminator - tries : 1 time : 0.00
Lin. dep. - tries : 1 time : 0.00
Lin. dep. - number : 0
Presolve terminated. Time: 0.00
Problem
Name :
Objective sense : min
Type : CONIC (conic optimization problem)
Constraints : 249
Cones : 228
Scalar variables : 1056
Matrix variables : 0
Integer variables : 0
Optimizer - threads : 8
Optimizer - solved problem : the primal
Optimizer - Constraints : 21
Optimizer - Cones : 228
Optimizer - Scalar variables : 792 conic : 456
Optimizer - Semi-definite variables: 0 scalarized : 0
Factor - setup time : 0.00 dense det. time : 0.00
Factor - ML order time : 0.00 GP order time : 0.00
Factor - nonzeros before factor : 231 after factor : 231
Factor - dense dim. : 0 flops : 2.36e+05
ITE PFEAS DFEAS GFEAS PRSTATUS POBJ DOBJ MU TIME
0 2.3e+02 1.3e+00 1.0e+00 0.00e+00 0.000000000e+00 0.000000000e+00 1.0e+00 0.01
1 7.7e+01 4.3e-01 3.1e-01 4.79e+00 -9.689817320e-01 -2.679040995e-01 3.4e-01 0.01
2 1.8e+01 9.8e-02 1.9e-02 1.64e+00 -2.871570204e-01 -2.475512489e-01 7.8e-02 0.01
3 8.3e+00 4.6e-02 3.3e-03 3.39e+00 -4.916078061e-02 -4.418477451e-02 3.7e-02 0.01
4 2.1e+00 1.2e-02 3.2e-04 1.97e+00 -7.912557910e-03 -7.279261325e-03 9.5e-03 0.02
5 3.7e-01 2.1e-03 2.1e-05 1.22e+00 -1.263634519e-03 -1.175928674e-03 1.6e-03 0.02
6 8.7e-02 4.8e-04 2.2e-06 1.02e+00 -3.109323780e-04 -2.974930960e-04 3.8e-04 0.02
7 3.3e-02 1.8e-04 4.1e-07 1.01e+00 -1.432630617e-04 -1.422573687e-04 1.5e-04 0.02
8 2.6e-02 1.4e-04 2.7e-07 1.01e+00 -1.383673651e-04 -1.380079676e-04 1.1e-04 0.02
9 7.3e-03 4.1e-05 3.2e-08 1.00e+00 -1.090134135e-04 -1.095447483e-04 3.2e-05 0.02
10 3.1e-03 1.7e-05 7.8e-09 9.96e-01 -1.068189067e-04 -1.071657638e-04 1.4e-05 0.02
11 4.7e-04 2.6e-06 3.7e-10 9.99e-01 -1.048900673e-04 -1.049575908e-04 2.1e-06 0.02
12 6.6e-05 3.7e-07 1.3e-11 1.00e+00 -1.048298597e-04 -1.048420565e-04 2.9e-07 0.02
13 2.9e-07 1.6e-09 2.4e-15 1.00e+00 -1.048366625e-04 -1.048367200e-04 1.3e-09 0.02
Optimizer terminated. Time: 0.03
Interior-point solution summary
Problem status : PRIMAL_AND_DUAL_FEASIBLE
Solution status : OPTIMAL
Primal. obj: -1.0483666252e-04 nrm: 1e+00 Viol. con: 1e-08 var: 6e-11 cones: 0e+00
Dual. obj: -1.0483672002e-04 nrm: 1e+00 Viol. con: 0e+00 var: 8e-11 cones: 0e+00
Optimizer summary
Optimizer - time: 0.03
Interior-point - iterations : 13 time: 0.02
Basis identification - time: 0.00
Primal - iterations : 0 time: 0.00
Dual - iterations : 0 time: 0.00
Clean primal - iterations : 0 time: 0.00
Clean dual - iterations : 0 time: 0.00
Simplex - time: 0.00
Primal simplex - iterations : 0 time: 0.00
Dual simplex - iterations : 0 time: 0.00
Mixed integer - relaxations: 0 time: 0.00
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +0.000104837
Problem is Solved
The max attenuation in the stopband is -39.79 dB.