Demo: Alternating Projections
Our goal is to find a point in the intersection of two convex sets \(C_1\) and \(C_2\). A similar goal is to find the projection of an arbitrary point onto the intersection; or, if the intersection is empty, find the point(s) in \(C_1\) that are as close as possible to \(C_2\). In this demo, the intersection of \(C_1\) and \(C_2\) is a singleton, so the concepts are the same.
We assume that we know how to project on the sets \(C_1\) and \(C_2\) individually, but not onto \(C_1\cap C_2\).
The basic algorithm to solve this problem is the alternating projection method, first studied by John von Neumann for the case where \(C_1\) and \(C_2\) are affine spaces. This algorithm can be extended to arbitrary convex sets, although you may not converge to the projection of the original point. The algorithm is very simple: starting at some point \(y\), and with \(x\leftarrow y\), we update \(x \leftarrow \text{Proj}_{C1}(\text{Proj}_{C2}(x))\), where \(\text{Proj}_{C1}\), \(\text{Proj}_{C2}\) are the projectors onto the sets \(C_1\) and \(C_2\), respectively.
Better methods (which actually give you the projection of y onto the intersection) are based on Dykstra’s algorithm (not to be confused with the Dijkstra algorithm described here on Wikipedia). Dykstra’s algorithm also uses only \(\text{Proj}_{C1}\) and \(\text{Proj}_{C2}\), but with a few intermediate steps. For an overview, see the book Alternating Projection Methods by Escalante and Raydan.
Another overview of both alternating projection and Dykstra are in the book chapter Proximal splitting methods in signal processing (PDF) by P. L. Combettes and J.-C. Pesquet, in the book ‘Fixed-Point Algorithms for Inverse Problems in Science and Engineering’, (ed.: H. H. Bauschke, R. S. Burachik, P. L. Combettes, V. Elser, D. R. Luke, and H. Wolkowicz, Editors), pp. 185-212. Springer, New York, 2011.
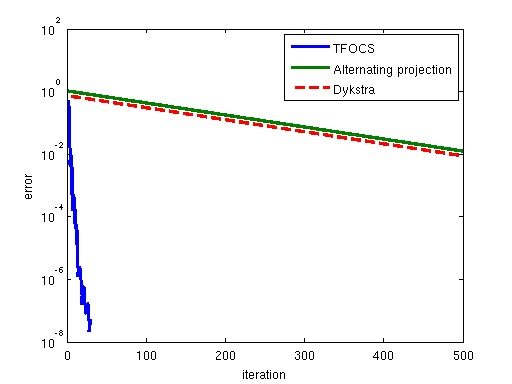
The purpose of this demo is to show the above two methods, and also how to formulate this with TFOCS. The advantage of solving this with TFOCS is that we can use an accelerated solver (Nesterov-style) and use large step-sizes and line search, whereas Dykstra has no step-size parameter. In the first example, it is especially apparent that TFOCS avoids the slow convergence that both the alternating projection and Dykstra algorithms suffer from. In the second example, the performance of alternating projections and TFOCS are quite similar.
This demo can be downloaded and run by executing demo_alternatingProjections.m.
Contents
- Mathematical formulation
- Demo with two polygon sets in 2D that intersect at (0,0)
- solve in TFOCS
- solve via alternating projection method
- solve via Dykstra’s algorithm
- Plot all the errors together
- Demo with two circles that intersect at (0,0)
- solve in TFOCS
- solve via alternating projection method
- solve via Dykstra’s algorithm
- Plot all the errors together
Mathematical formulation
For a given point y, and two convex sets C1 and C2, we wish to find the closest point x to y, such that x is in both C1 and C2. We write this as:
\[\textrm{minimize}_{x\in C_1 \cap C_2} \,\, \mu/2||x\textrm{–}y||_2^2\]The parameter \(\mu>0\) is arbitrary and does not affect the answer.
This fits naturally into the TFOCS formulation since the primal problem is already strongly convex.
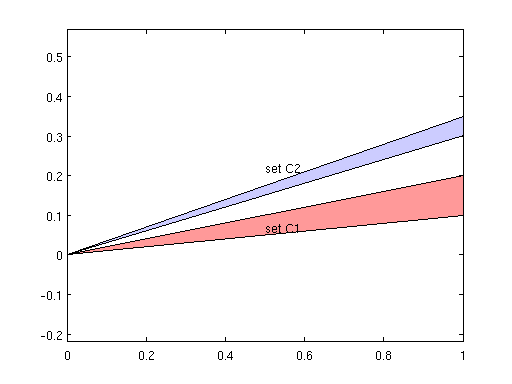
Demo with two polygon sets in 2D that intersect at (0,0)
Set the dimension to 2
N = 2; % 2D is best for visualization
Define some 2D polygons
mx = 1; x1a = [1;.1]; x1b = [1;.2]; xx1 = [0,x1a(1),2*mx,x1b(1)]; yy1 = [0,x1a(2),2*mx,x1b(2)]; x2a = [1;.3]; x2b = [1;.35]; xx2 = [0,x2a(1),2*mx,x2b(1)]; yy2 = [0,x2a(2),2*mx,x2b(2)];
The solution is at x = (0,0), so our error function is simple
err = @(x) norm(x);
plot the regions
figure red = [255,153,153]/255; blue = [204,204,255]/255; fill( xx1, yy1,red); hold on fill( xx2, yy2,blue); xlim( [0,mx] ); ylim( [0,.5*mx] ); axis equal text(.5,.07,'set C1'); text(.5,.22,'set C2');
Make some operators that will be used with TFOCS
addpath ~/Dropbox/TFOCS/ % modify this to wherever it is installed on your computer op1 = project2DCone(x1a, x1b ); op2 = project2DCone(x2a, x2b ); offset1 = 0; offset2 = 0; op1_d = prox_dualize(op1); op2_d = prox_dualize(op2); % and some simpler operators that we will use with alternating projections % and with Dykstra proj1 = @(x) callandmap( op1, 2, x, 1); % gamma is irrelevant proj2 = @(x) callandmap( op2, 2, x, 1 ); % gamma is irrelevant % for all methods, we need to specify a starting point x0 = [1; 1/4];
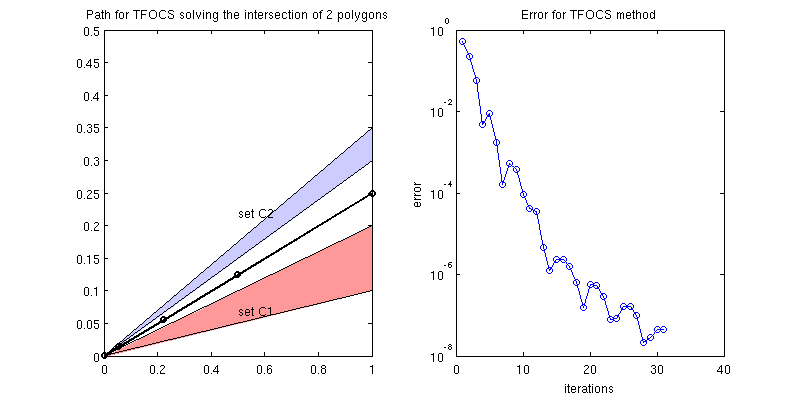
solve in TFOCS
We can pick any mu and should get the same result, although due to some scaling issues in stopping criteria, it does have a small effect.
mu = 1e-6; opts = struct('debug',false,'printEvery',20,'maxIts',200); opts.errFcn{1} = @(f,d,x) err(x); opts.errFcn{2} = @(f,d,x) recordPoints(x); recordPoints(); % zero-out counter. We use this to plot the points later opts.tol = 1e-15; affineOperator = {eye(N),offset1;eye(N),offset2}; dualProx = {op1_d,op2_d}; % Solve in TFOCS: [x,out,optsOut] = tfocs_SCD( [], affineOperator, dualProx , mu, x0, [], opts ); % Record the path: path = recordPoints(); path = [x0,path]; figure subplot(1,2,1); fill( xx1, yy1,red); hold on fill( xx2, yy2,blue); xlim( [0,mx] ); ylim( [0,.5*mx] ); text(.5,.07,'set C1'); text(.5,.22,'set C2'); plot( path(1,:), path(2,:),'ko-','linewidth',2 ) title('Path for TFOCS solving the intersection of 2 polygons'); subplot(1,2,2); semilogy( out.err(:,1) ,'o-'); xlabel('iterations'); ylabel('error'); title('Error for TFOCS method'); set(gcf, 'Position', [400 200 800 400]);
Auslender & Teboulle's single-projection method Iter Objective |dx|/|x| step errors ----+----------------------------------+------------------- 20 | +Inf 2.90e-13 1.91e-07*| 5.64e-07 0.00e+00 31 | +Inf 1.33e-16 1.39e-07*| 4.56e-08 0.00e+00 Finished: Step size tolerance reached
solve via alternating projection method
maxIts = 500; x = x0; path = [x0]; errHist = []; for k = 1:maxIts % basic alternating projection method: x = proj1(x); path= [path, x]; x = proj2(x); path= [path, x]; errHist = [ errHist; err(x) ]; if ~mod(k,50) fprintf('Iter %4d, error is %.2e\n', k, errHist(end) ); end end figure subplot(1,2,1); fill( xx1, yy1,red); hold on fill( xx2, yy2,blue); xlim( [0,mx] ); ylim( [0,.5*mx] ); text(.5,.07,'set C1'); text(.5,.22,'set C2'); plot( path(1,:), path(2,:),'ko-','linewidth',1 ) title('Path for alternating projection method solving the intersection of 2 polygons'); subplot(1,2,2); semilogy( errHist, 'o-' ); xlabel('iterations'); ylabel('error'); errHist_1 = errHist; title('Error for alternating projection method'); set(gcf, 'Position', [400 200 800 400]);
Iter 50, error is 6.64e-01 Iter 100, error is 4.26e-01 Iter 150, error is 2.74e-01 Iter 200, error is 1.76e-01 Iter 250, error is 1.13e-01 Iter 300, error is 7.25e-02 Iter 350, error is 4.65e-02 Iter 400, error is 2.99e-02 Iter 450, error is 1.92e-02 Iter 500, error is 1.23e-02
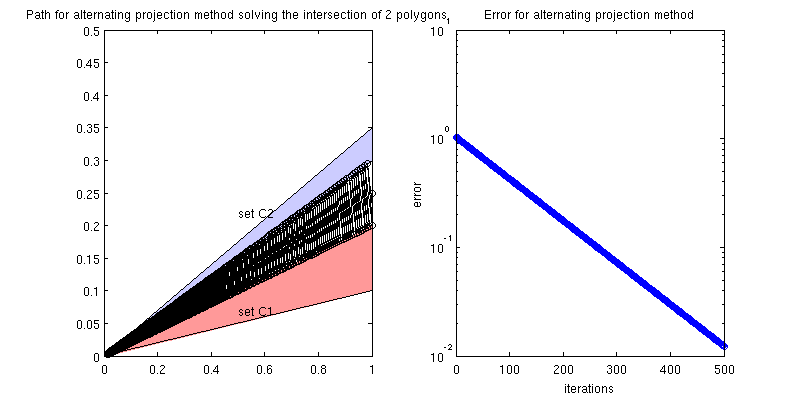
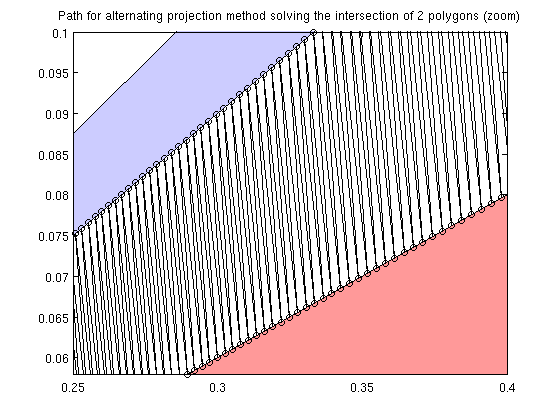
With alternating projections, we get very slow convergence because of the very low angle between the two sets. Here is a zoom in on the graph of the iterates:
figure fill( xx1, yy1,red); hold on fill( xx2, yy2,blue); xlim( [0,mx] ); ylim( [0,.5*mx] ); text(.5,.07,'set C1'); text(.5,.22,'set C2'); plot( path(1,:), path(2,:),'ko-' ) title('Path for alternating projection method solving the intersection of 2 polygons (zoom)'); xlim( [.25,.4] ); ylim( [.058,.1])
solve via Dykstra’s algorithm
maxIts = 500; x = x0; [p,q] = deal( 0*x0 ); p = -.25*[1;1]; path = [x0]; errHist = []; for k = 1:maxIts % If x + p is feasible, the y = (x+p), so p=x+p-y = 0. y = proj1( x + p ); p = x + p - y; x = proj2( y + q ); q = y + q - x; path = [path,y,x]; errHist = [ errHist; err(x) ]; if ~mod(k,50) fprintf('Iter %4d, error is %.2e\n', k, errHist(end) ); end end figure subplot(1,2,1); fill( xx1, yy1,red); hold on fill( xx2, yy2,blue); xlim( [0,mx] ); ylim( [0,.5*mx] ); text(.5,.07,'set C1'); text(.5,.22,'set C2'); plot( path(1,:), path(2,:),'ko-' ) title('Path for Dykstra''s algo solving the intersection of 2 polygons'); subplot(1,2,2); semilogy( errHist, 'o-' ); xlabel('iterations'); ylabel('error'); title('Error for Dykstra''s method'); set(gcf, 'Position', [400 200 800 400]);
Iter 50, error is 4.70e-01 Iter 100, error is 3.01e-01 Iter 150, error is 1.94e-01 Iter 200, error is 1.24e-01 Iter 250, error is 7.98e-02 Iter 300, error is 5.12e-02 Iter 350, error is 3.29e-02 Iter 400, error is 2.11e-02 Iter 450, error is 1.36e-02 Iter 500, error is 8.71e-03
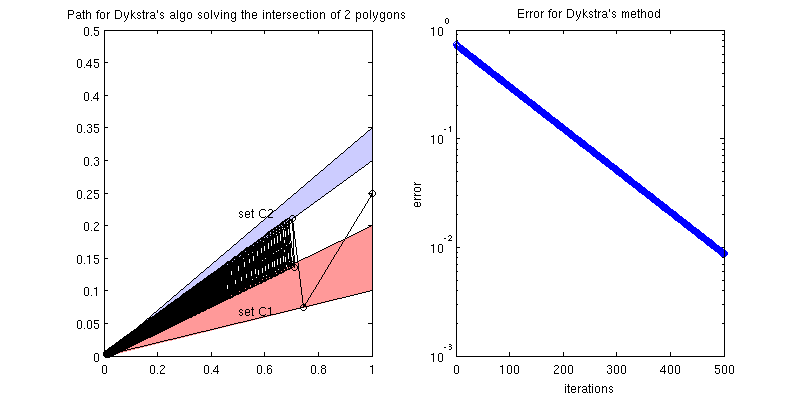
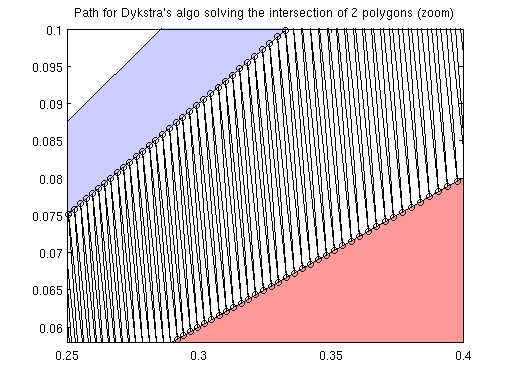
With Dykstra’s algo (and alternating projections), we get very slow convergence, because of the very low angle between the two sets. Here is a zoom in on the graph of the iterates:
figure fill( xx1, yy1,red); hold on fill( xx2, yy2,blue); xlim( [0,mx] ); ylim( [0,.5*mx] ); text(.5,.07,'set C1'); text(.5,.22,'set C2'); plot( path(1,:), path(2,:),'ko-' ) title('Path for Dykstra''s algo solving the intersection of 2 polygons (zoom)'); xlim( [.25,.4] ); ylim( [.058,.1])
Plot all the errors together
figure semilogy( out.err(:,1),'-' ,'linewidth',3); hold all semilogy( errHist_1,'-','linewidth',3); semilogy( errHist,'--','linewidth',3); legend('TFOCS','Alternating projection','Dykstra'); xlabel('iteration'); ylabel('error');
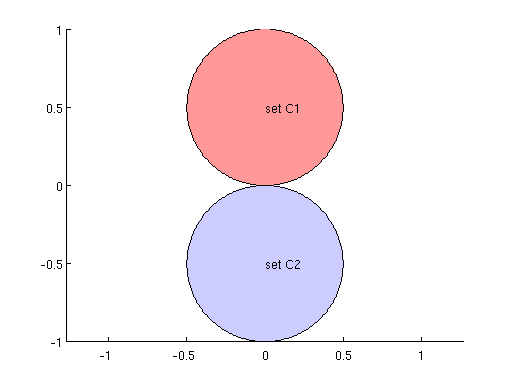
Demo with two circles that intersect at (0,0)
center1 = [0;.5]; radius1 = .5; center2 = -center1; radius2 = radius1; figure rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red) rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue) axis equal hold on text(0,.5,'set C1'); text(0,-.5,'set C2'); offset1 = center1; offset2 = center2; op1_d = prox_l2(radius1); op2_d = prox_l2(radius2); x0 = [1; .2]; % and some simpler operators that we will use with alternating projections % and with Dykstra proj1 = @(x) radius1*(x-center1)/norm(x-center1) + center1; proj2 = @(x) radius2*(x-center2)/norm(x-center2) + center2;
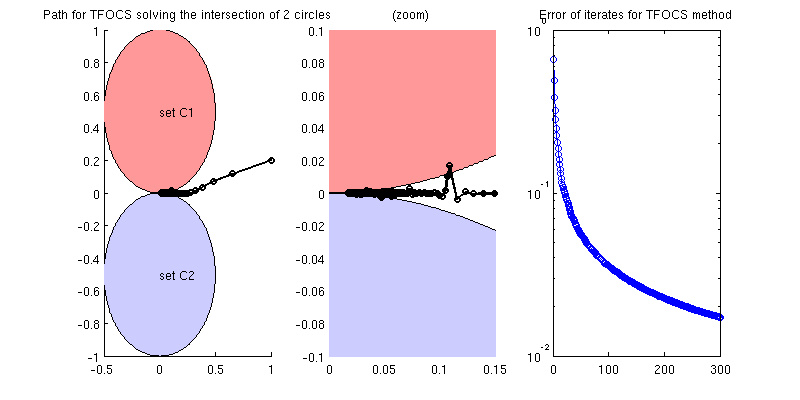
solve in TFOCS
opts.maxIts = 300;
affineOperator = {eye(N),offset1;eye(N),offset2};
dualProx = {op1_d,op2_d};
% Solve in TFOCS:
[x,out,optsOut] = tfocs_SCD( [], affineOperator, dualProx , mu, x0, [], opts );
% Record the path:
path = recordPoints();
path = [x0,path];
% Plot:
figure
subplot(1,3,1);
rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red)
rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue)
hold on
text(0,.5,'set C1');
text(0,-.5,'set C2');
plot( path(1,:), path(2,:),'ko-','linewidth',2 )
title('Path for TFOCS solving the intersection of 2 circles');
subplot(1,3,2);
rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red)
rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue)
hold on
plot( path(1,:), path(2,:),'ko-','linewidth',2 )
xlim([0,.15]);
ylim([-.1,.1]);
title('(zoom)');
subplot(1,3,3);
semilogy( out.err,'o-')
title('Error of iterates for TFOCS method');
set(gcf, 'Position', [400 200 800 400]);
Auslender & Teboulle's single-projection method Iter Objective |dx|/|x| step errors ----+----------------------------------+------------------- 20 | +4.54278e-07 5.76e-08 3.50e-07 | 1.03e-01 0.00e+00 40 | +4.77330e-07 7.02e-08 7.67e-07 | 6.54e-02 0.00e+00 60 | +4.87236e-07 6.88e-08 9.69e-07 | 5.00e-02 0.00e+00 80 | +4.92960e-07 7.36e-08 1.35e-06 | 4.12e-02 0.00e+00 100 | +4.96441e-07 4.53e-08 6.01e-07 | 3.58e-02 0.00e+00 120 | +4.99070e-07 5.29e-08 9.22e-07 | 3.17e-02 0.00e+00 140 | +5.01121e-07 3.21e-08 3.83e-07 | 2.86e-02 0.00e+00 160 | +5.02670e-07 4.33e-08 7.53e-07 | 2.62e-02 0.00e+00 180 | +5.03948e-07 3.34e-08 4.85e-07 | 2.43e-02 0.00e+00 200 | +5.05036e-07 4.42e-08 9.10e-07 | 2.26e-02 0.00e+00 220 | +5.05974e-07 2.64e-08 3.51e-07 | 2.12e-02 0.00e+00 240 | +5.06727e-07 3.52e-08 6.55e-07 | 2.01e-02 0.00e+00 260 | +5.07428e-07 2.81e-08 4.41e-07 | 1.90e-02 0.00e+00 280 | +5.08001e-07 3.32e-08 6.45e-07 | 1.81e-02 0.00e+00 300 | +5.08570e-07 4.60e-08 1.30e-06 | 1.73e-02 0.00e+00 Finished: Iteration limit reached
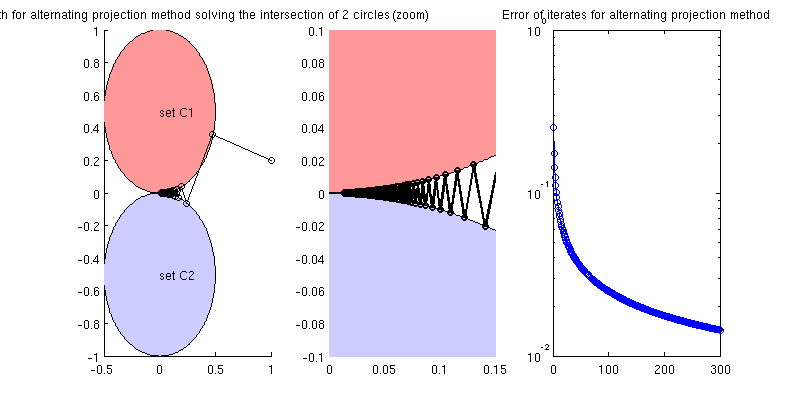
solve via alternating projection method
maxIts = 300; x = x0; path = [x0]; errHist = []; for k = 1:maxIts % basic alternating projection method: x = proj1(x); path= [path, x]; x = proj2(x); path= [path, x]; errHist = [ errHist; err(x) ]; if ~mod(k,50) fprintf('Iter %4d, error is %.2e\n', k, errHist(end) ); end end figure subplot(1,3,1); rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red) rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue) hold on text(0,.5,'set C1'); text(0,-.5,'set C2'); plot( path(1,:), path(2,:),'ko-' ) title('Path for alternating projection method solving the intersection of 2 circles'); subplot(1,3,2); rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red) rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue) hold on plot( path(1,:), path(2,:),'ko-','linewidth',2 ) xlim([0,.15]); ylim([-.1,.1]); title('(zoom)'); subplot(1,3,3); semilogy( errHist,'o-') errHist_1 = errHist; title('Error of iterates for alternating projection method'); set(gcf, 'Position', [400 200 800 400]);
Iter 50, error is 3.53e-02 Iter 100, error is 2.50e-02 Iter 150, error is 2.04e-02 Iter 200, error is 1.77e-02 Iter 250, error is 1.58e-02 Iter 300, error is 1.44e-02
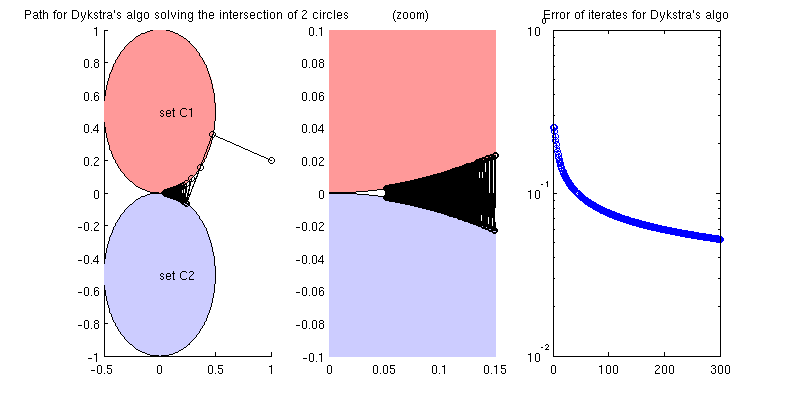
solve via Dykstra’s algorithm
maxIts = 300; x = x0; [p,q] = deal( 0*x0 ); path = [x0]; errHist = []; for k = 1:maxIts % If x + p is feasible, the y = (x+p), so p=x+p-y = 0. y = proj1( x + p ); p = x + p - y; x = proj2( y + q ); q = y + q - x; path = [path,y]; path = [path,x]; errHist = [ errHist; err(x) ]; if ~mod(k,50) fprintf('Iter %4d, error is %.2e\n', k, errHist(end) ); end end figure subplot(1,3,1); rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red) rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue) hold on text(0,.5,'set C1'); text(0,-.5,'set C2'); plot( path(1,:), path(2,:),'ko-' ) title('Path for Dykstra''s algo solving the intersection of 2 circles'); subplot(1,3,2); rectangle('Position',[-radius1,0,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',red) rectangle('Position',[-radius1,-2*radius2,2*radius1,2*radius1],'Curvature',[1,1],'FaceColor',blue) hold on plot( path(1,:), path(2,:),'ko-','linewidth',2 ) xlim([0,.15]); ylim([-.1,.1]); title('(zoom)'); subplot(1,3,3); semilogy( errHist,'o-') title('Error of iterates for Dykstra''s algo'); set(gcf, 'Position', [400 200 800 400]);
Iter 50, error is 9.52e-02 Iter 100, error is 7.52e-02 Iter 150, error is 6.56e-02 Iter 200, error is 5.96e-02 Iter 250, error is 5.53e-02 Iter 300, error is 5.20e-02
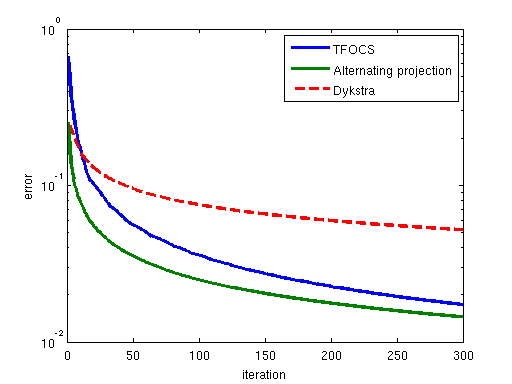
Plot all the errors together
figure semilogy( out.err(:,1),'-' ,'linewidth',3); hold all semilogy( errHist_1,'-','linewidth',3); semilogy( errHist,'--','linewidth',3); legend('TFOCS','Alternating projection','Dykstra'); xlabel('iteration'); ylabel('error');
Published with MATLAB® 7.12